轮式导航系统HTTP & MQTT接口应用示例
下文将以轮式导航系统自带的地图编辑工具为应用范例,介绍轮式导航系统HTTP及MQTT接口在该软件中是如何实践的。
HTTP常用接口示例
地图接口
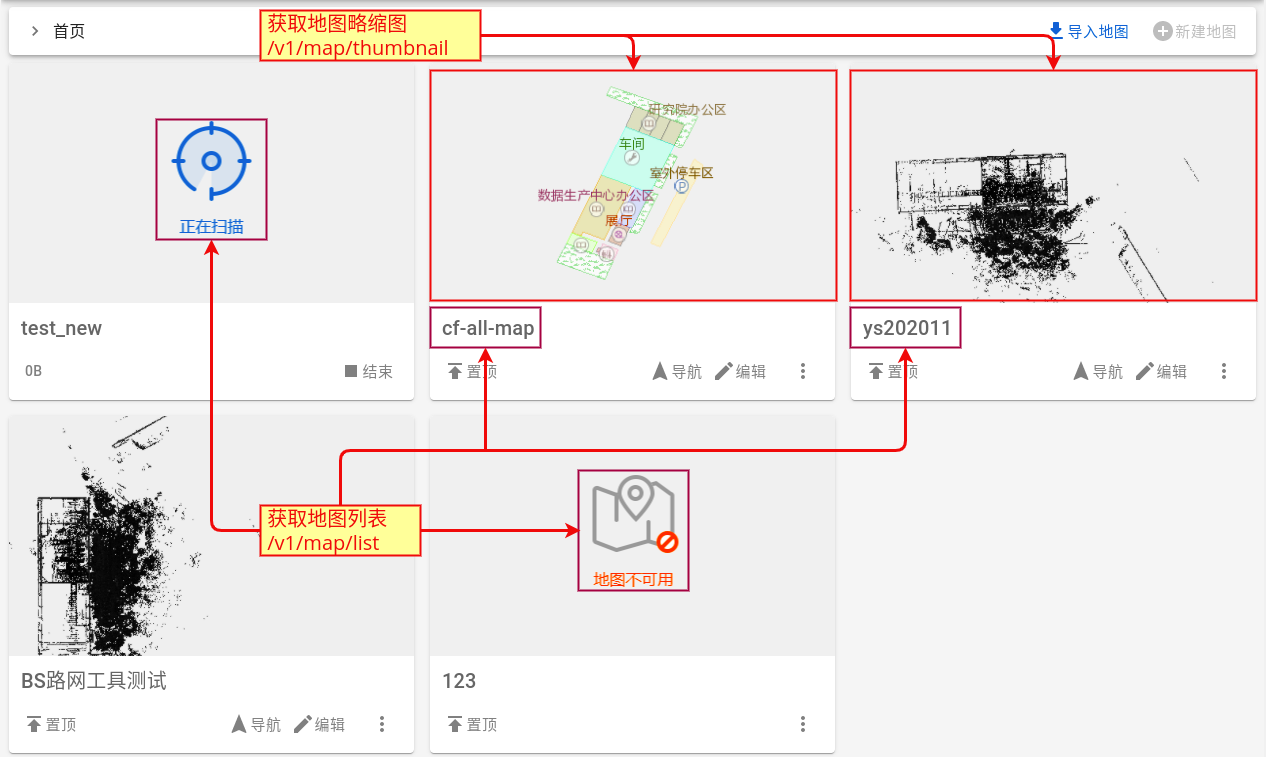
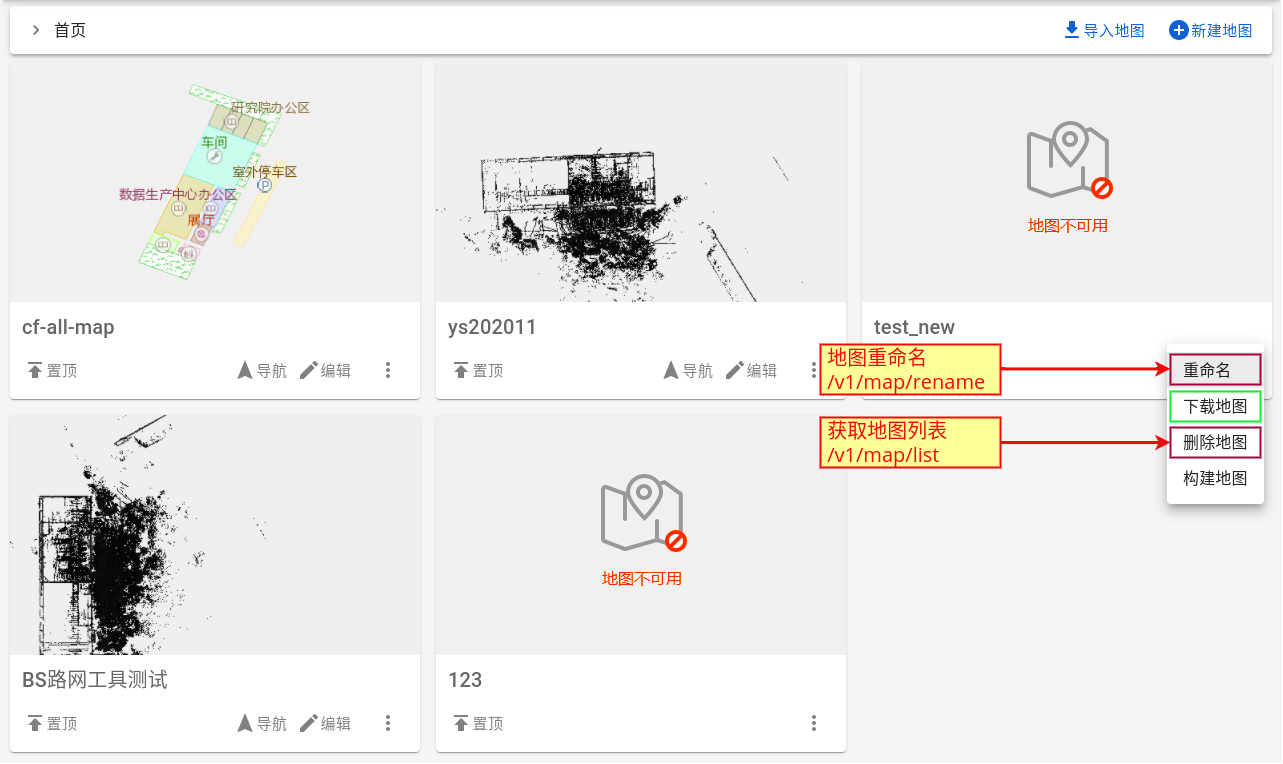
- 获取地图列表:/v1/map/list
- 获取地图缩略图:/v1/map/thumbnail
- 地图重命名:/v1/map/rename
- 删除地图工程:/v1/map/delete
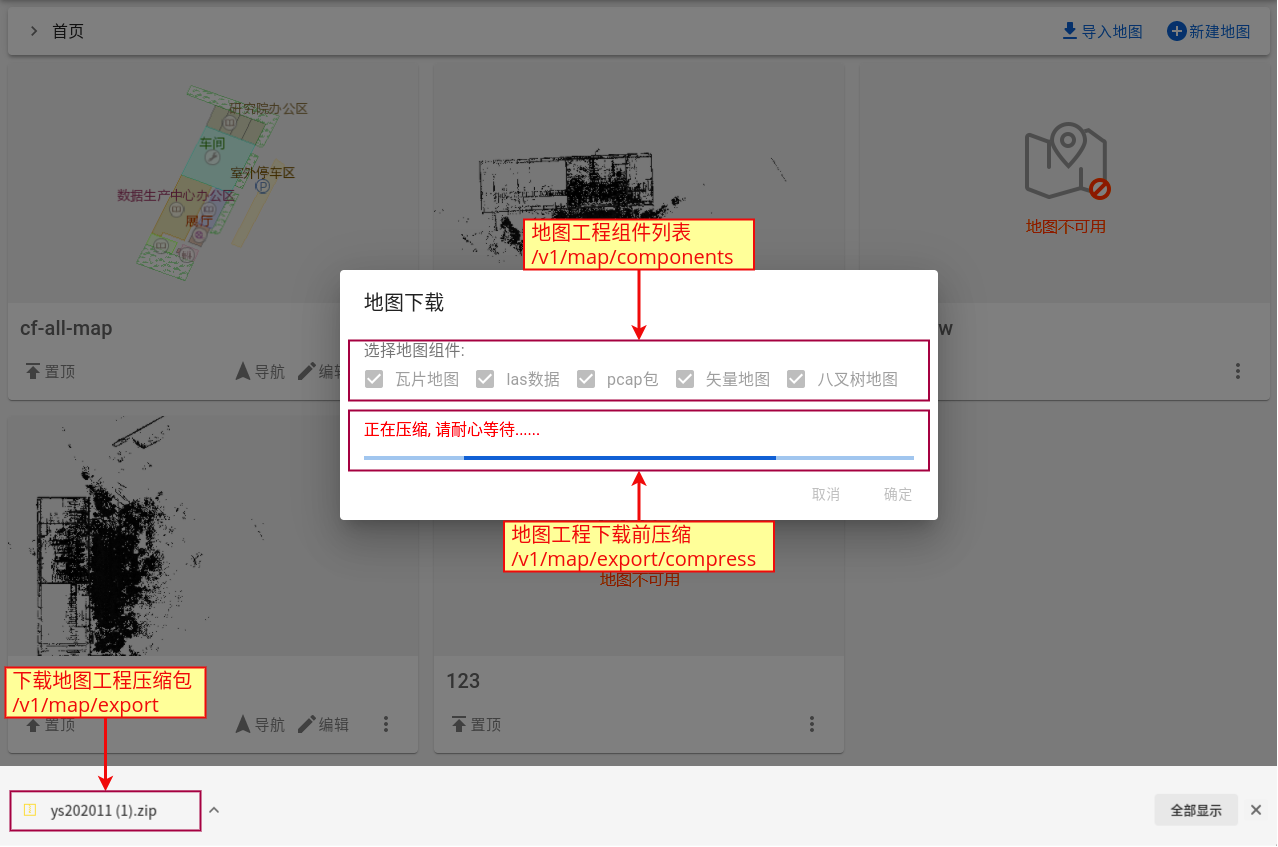
- 地图工程组件列表:/v1/map/components
- 地图工程下载前压缩:/v1/map/export/compress
- 下载地图工程压缩包:/v1/map/export
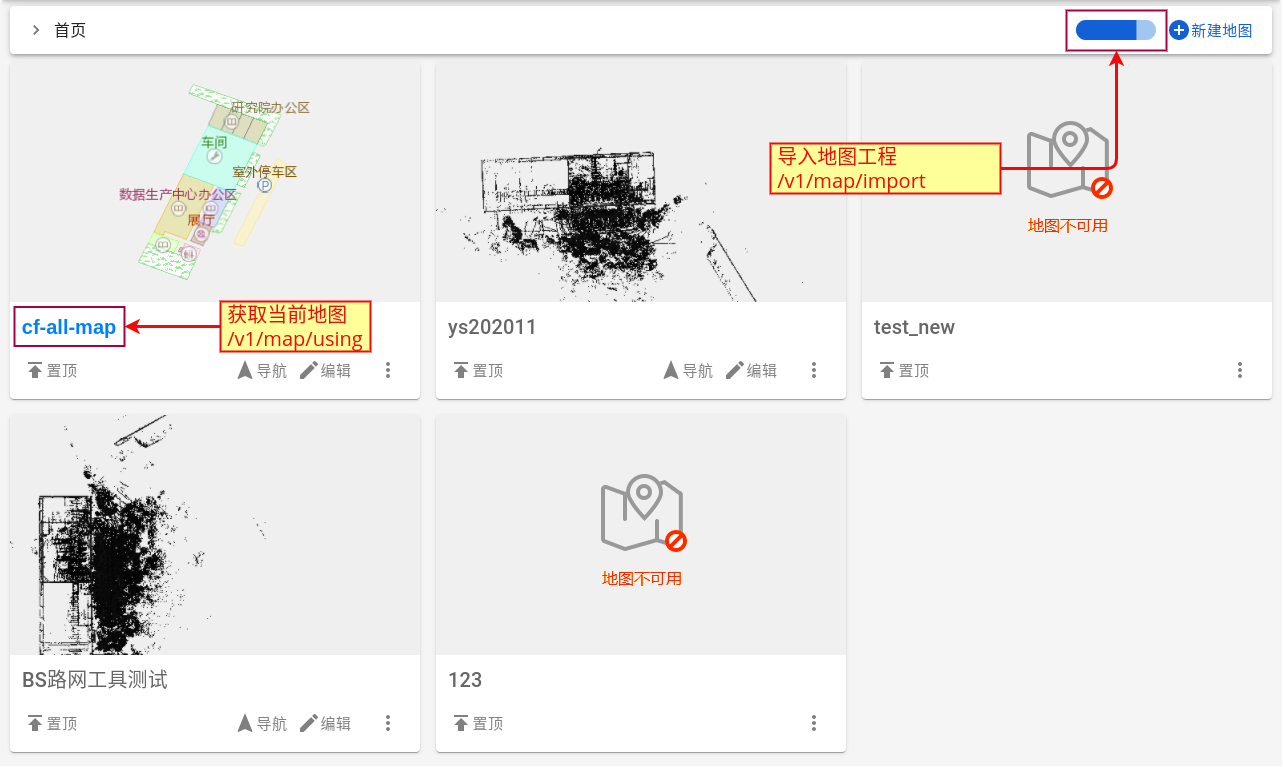
- 导入地图工程:/v1/map/import
- 获取当前地图:/v1/map/using
瓦片及矢量地图接口
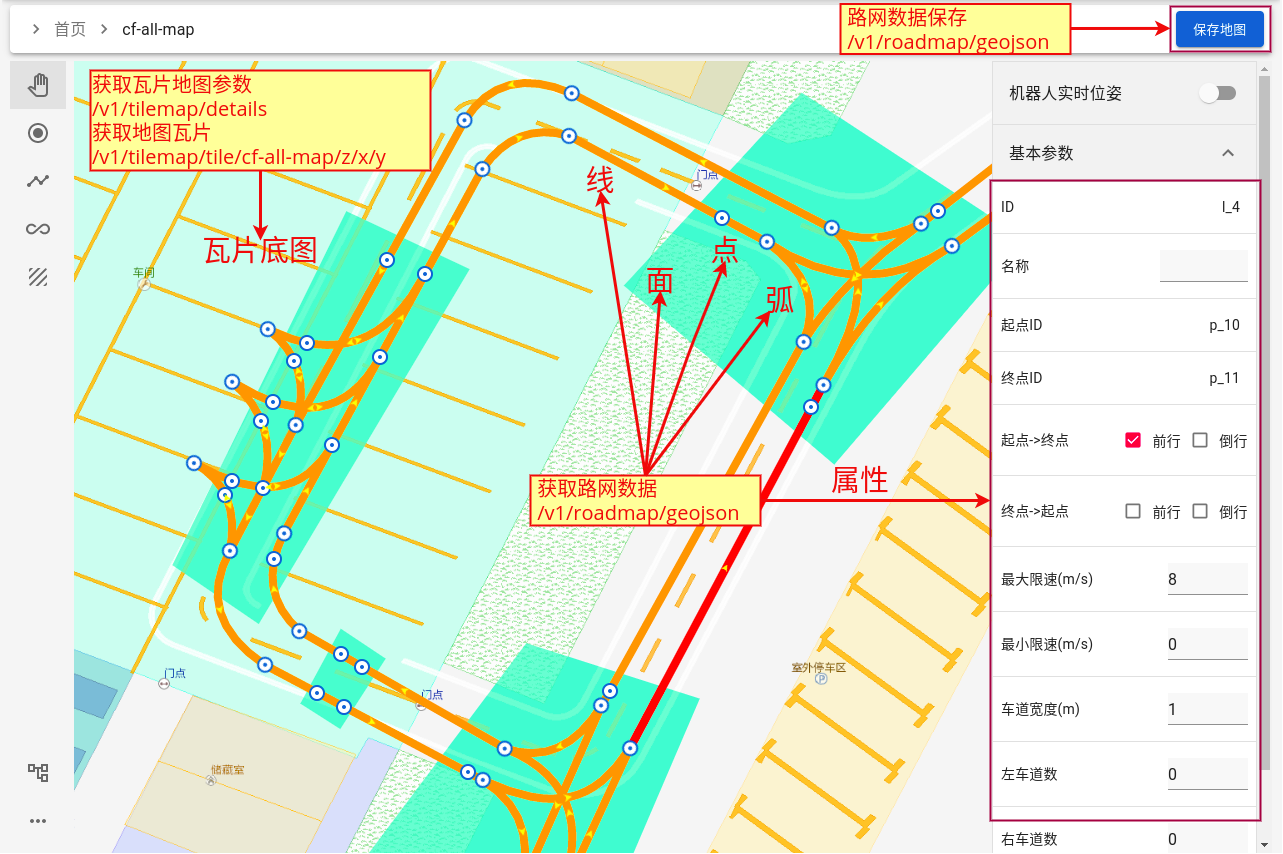
- 获取瓦片地图参数:/v1/tilemap/details
- 获取地图瓦片:/v1/tilemap/tile/地图名/层级/x索引/y索引
- 获取路网数据: /v1/roadmap/geojson
- 路网数据保存:/v1/roadmap/geojson
传感数据接口
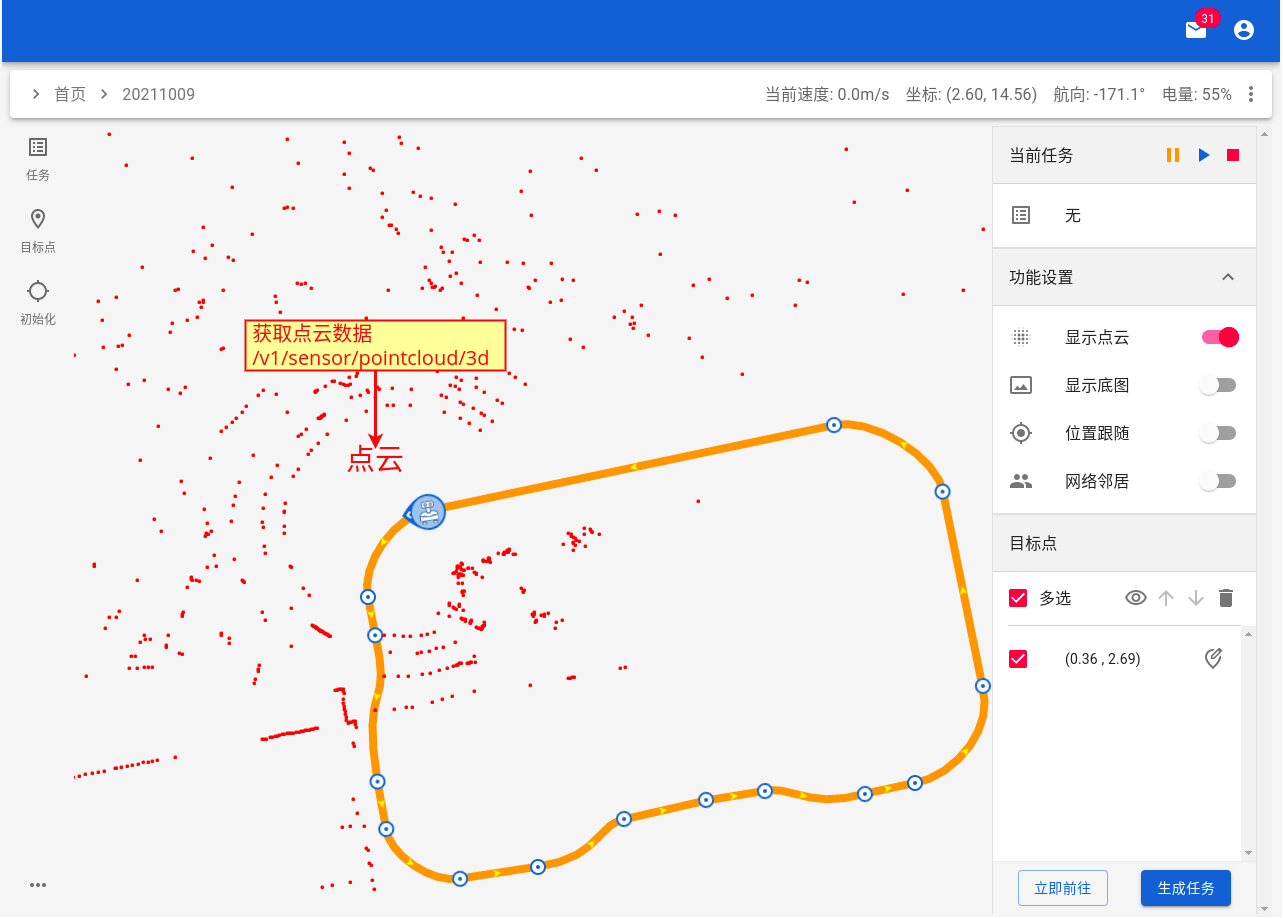
- 获取实时点云数据: /v1/sensor/pointcloud/3d
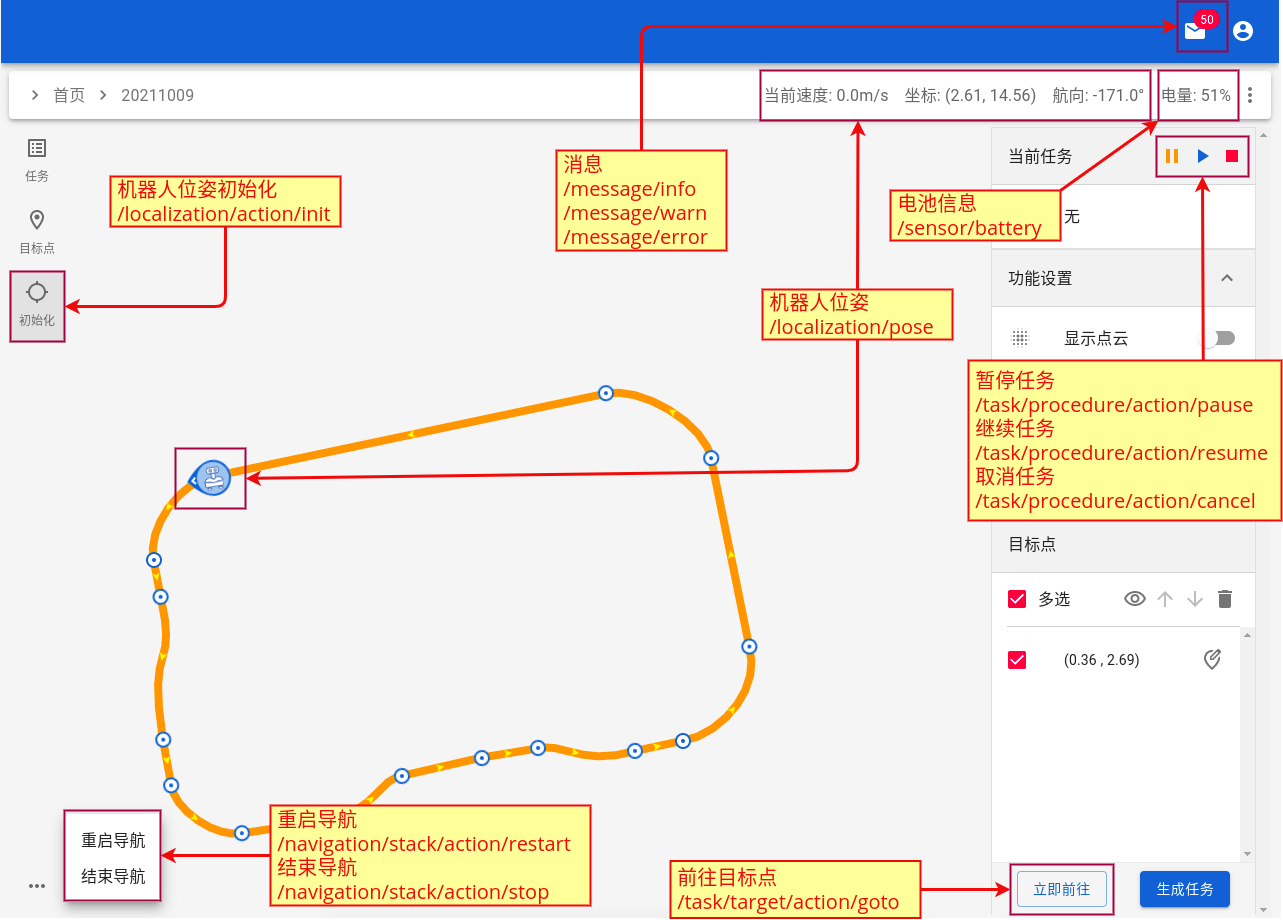
MQTT常用接口示例
- 机器人位姿:/localization/pose
- 机器人位姿初始化:/localization/action/init
- 结束导航:/navigation/stack/action/stop
- 重启导航:/navigation/stack/action/restart
- 前往目标点:/task/target/action/goto
- 暂停任务:/task/procedure/action/pause
- 继续任务:/task/procedure/action/resume
- 取消任务:/task/procedure/action/cancel
- 电池信息:/sensor/battery
- 错误信息:/message/error
- 告警信息:/message/warn
- 日志信息:/message/info